-
-
-
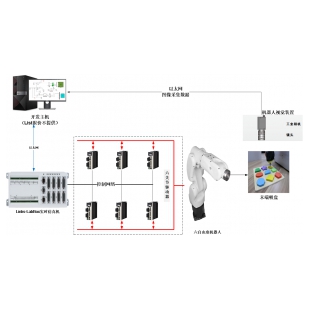
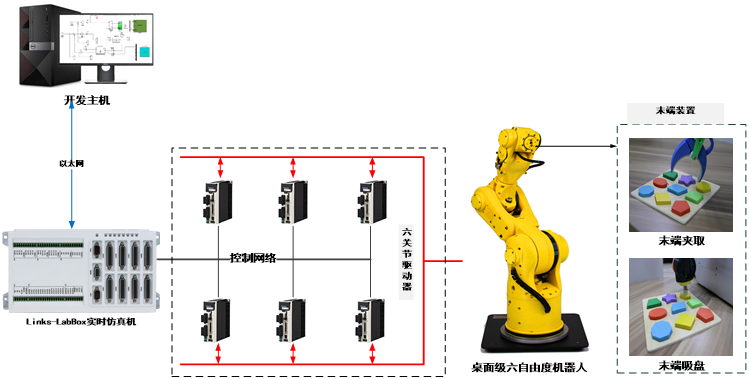
硬件在回路HIL實時仿真桌面級六自由度機器人半實物實驗平臺

- 品牌:北京靈思創奇
- 型號: LINKS-ES-6DOF-01
- 產地:北京 昌平區
- 供應商報價:面議
-
北京靈思創奇科技有限公司
 更新時間:2021-02-23 09:31:53
更新時間:2021-02-23 09:31:53 -
銷售范圍售全國
入駐年限第5年
營業執照已審核
- 同類產品半實物實時仿真機(10件)

立即掃碼咨詢
聯系方式:400-822-6768
聯系我們時請說明在儀器網(www.ghhbs.com.cn)上看到的!
掃 碼 分 享 -
為您推薦




產品特點
- 一、產品概述
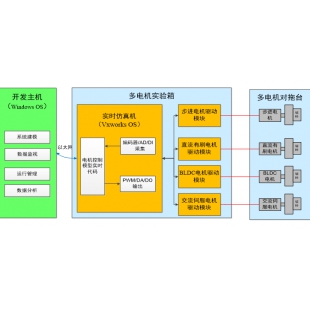
實時仿真機是一種嵌入式工業計算機,具備豐富的I/O資源,并運行嵌入式實時操作系統。面向不同的應用場景,我公司提供多種類型的實時仿真機供用戶選擇。
二、特征優勢
1、支持RCP快速原型設計
實現用戶的Matlab/Simulink仿真模型到嵌入式控制原型的自動轉換;
2、支持HIL硬件在回路測試
用戶的控制器等實物設備可以直接與Links-Box快速原型仿真器連接,動態驗證實物控制器性能;
3、IO資源豐富
有大量的IO板卡資源供用戶選擇,包括:DIO、AIO、PWM、CAN、RS232/422、1553B、ARINC429等。
4、可選配型號多
可選配型號多:根據不同的應用場景,有嵌入式單板設備、PCI/CPCI/PXIe等多種架構設備供選擇。
三、硬件組成
實時仿真機有多種基本硬件配置,可根據用戶需求進行定制。 詳細介紹
本平臺以桌面級垂直串聯六自由度機器人為被控對象,提供了半物理開發驗證環境,在滿足基本機器人示教操作的同時,可以對六自由度機器人的軌跡規劃、空間插補算法、正/逆運動學解算等機器人學及其控制理論算法的本科教學提供實驗支撐。
1、支持RCP快速原型設計
2、開發環境友好:
3、桌面級機器人:
4、機器人實現動作:
5、多樣化的調試手段
6、開源示例
三、實驗內容
?機器人機械系統認識實驗;機器人控制系統認識實驗; ???????四、實驗示例
基于Matlab開發的六關節機器人的軌跡規劃仿真軟件sxTeach,為學生初步學習機器人軌跡規劃和運動學正逆解算法提供了離線仿真環境。試驗界面如下圖所示,可以完成如下功能:
? 編輯運動軌跡 ? 軌跡規劃
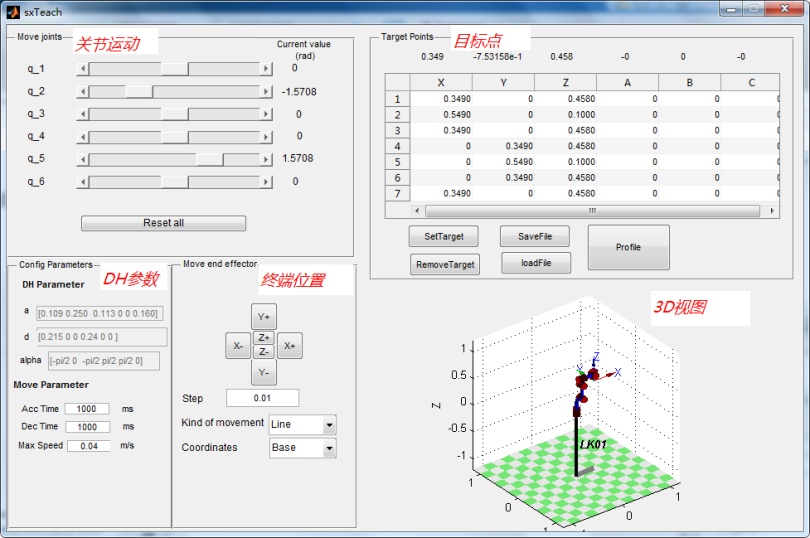
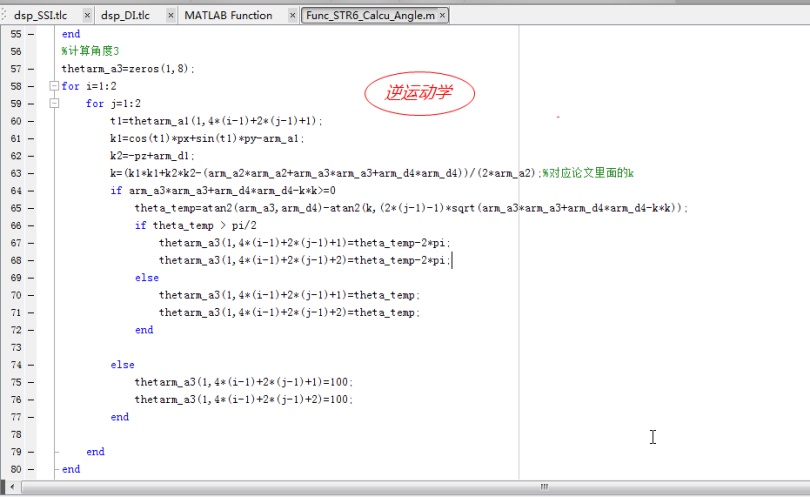
軌跡規劃仿真軟件sxTeach的后臺運算采用M語言編寫,且所有源代碼均向用戶開放。
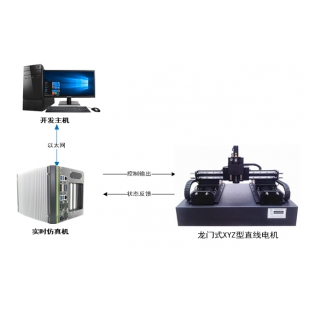
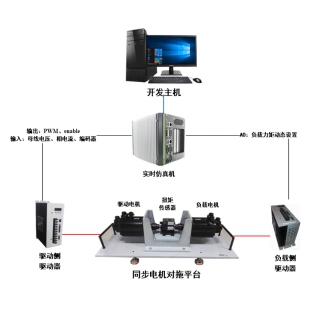
在完成機器人離線仿真實驗的基礎上,本平臺更多地是使用真實的機器人實物本體作為控制對象。用戶基于Matlab Simulink可快速完成機器人控制算法的開發,經自動編譯后生成VxWorks實時系統代碼,ZH實時代碼部署到實時仿真器中運行,并通過多軸運動控制卡實現對機器人各關節的控制。
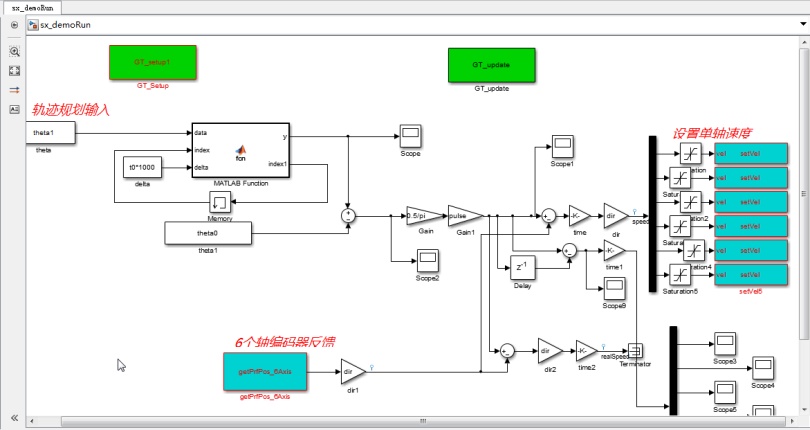
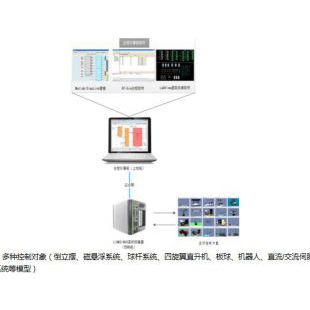
在六關節機器人控制系統模型中,我公司主要提供了控制算法示例模型和運動控制的硬件模型庫。用戶可基于本實驗示例,任意替換機器人控制模型的各個算法模塊,在無需關注底層軟硬件接口實現的前提下,快速驗證自己的機器人控制系統算法模型。
五、選型配置
產品名稱
產品型號
系統配置
桌面級六自由度機器人半實物實驗平臺
LINKS-ES-6DOF-01
桌面級六自由度機器人
Links-V6 Beta
實時仿真機
Links-LabBox
實時仿真軟件包
Links-RT
機器人集成實驗臺
Links-LabBench
北京交通大學 ZG科學院空間應用工程與技術中心 青島大學 ?上海理工大學 上海工程技術大學 ?<span microsoft="" yahei";="" font-size:="" 12px;"="" font-size:14px;"="" style="box-sizing: inherit;font-size: 14px">北京航空航天大學
技術資料